Project Focus
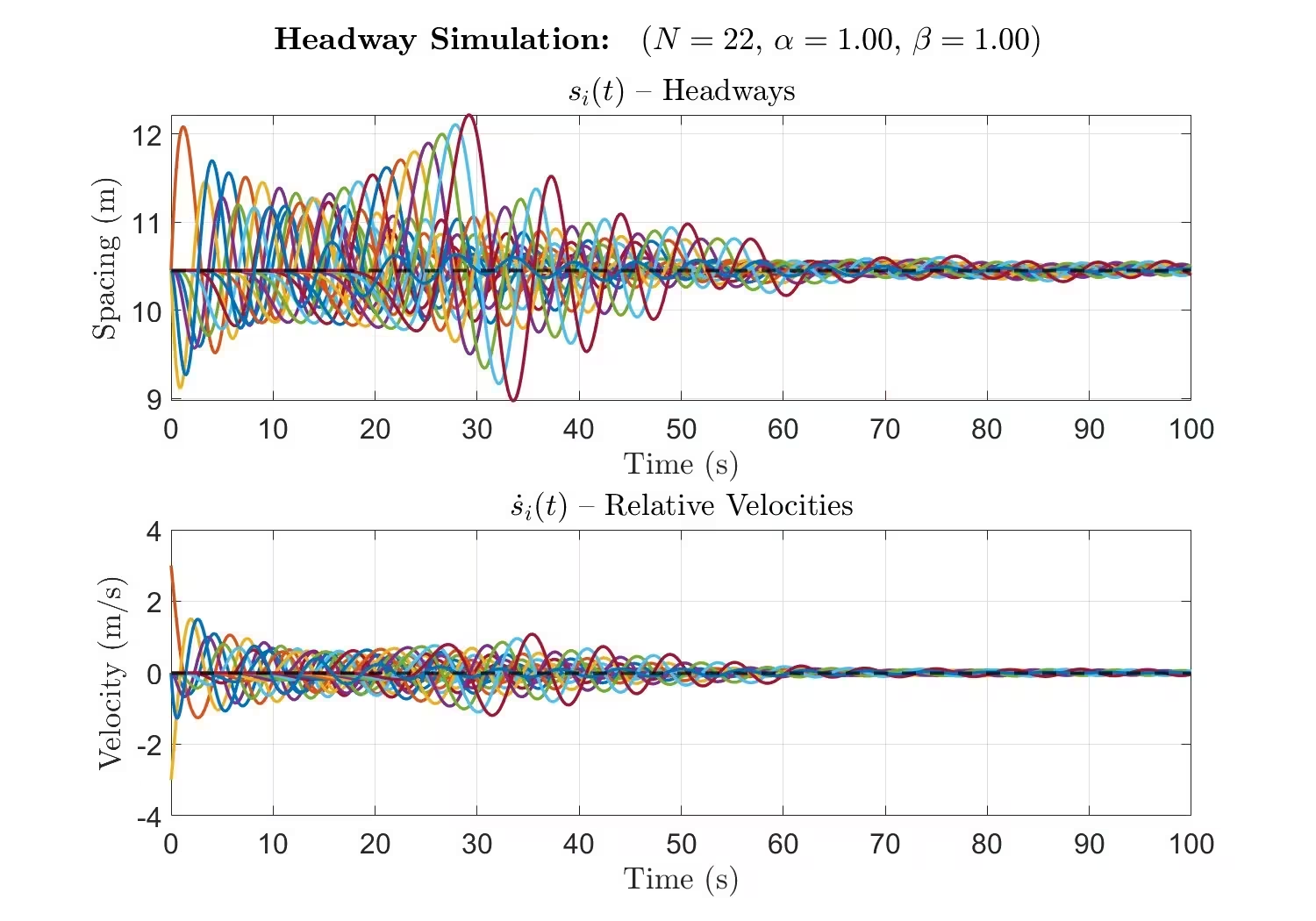
I studied traffic flow on a ring road made up of identical human-driven vehicles using a modified predecessor-following Helly model, expressed in terms of headway deviations. The main question was how stability changes with vehicle gains and fleet size, and how far frequency-domain guarantees differ from plain interconnection stability.
From there, I showed that the system can be stabilized by introducing a single autonomous vehicle and controlling it with an LQR policy in simulation. The project tied together distributed dynamics, stability analysis, and a concrete control design that directly used the course framework.