Minimal on Wheels
Bachelor's thesis on a hybrid wheeled-legged quadruped
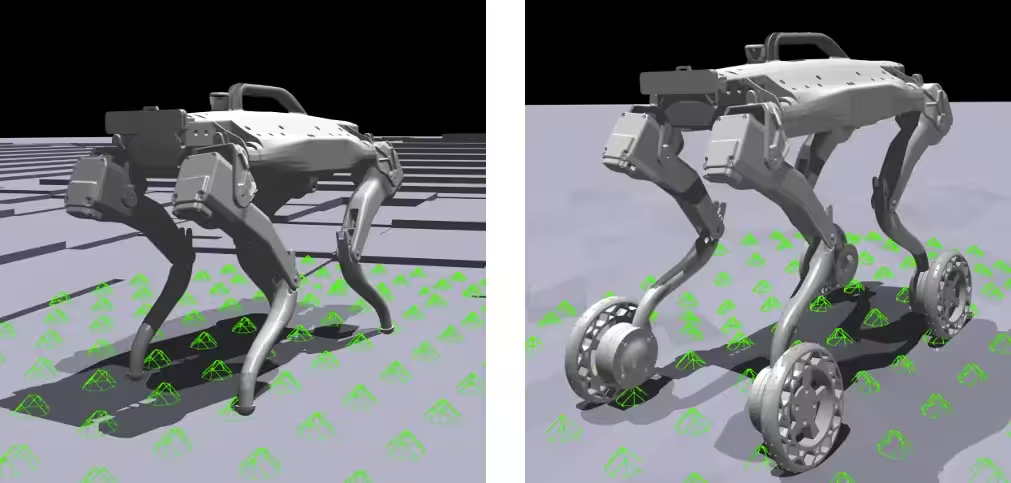
Minimal on Wheels was my bachelor's project. Starting from an existing quadruped platform, I redesigned it into a hybrid wheeled-legged robot with new mechanical and electrical components, a learned locomotion policy trained in Isaac Gym, and a full ROS2 software stack.

Performance To Architecture
The project began with performance analysis: what kind of speed, torque, and terrain handling the converted robot should achieve. That defined the actuator choice, power budget, and the overall packaging constraints for the leg redesign.

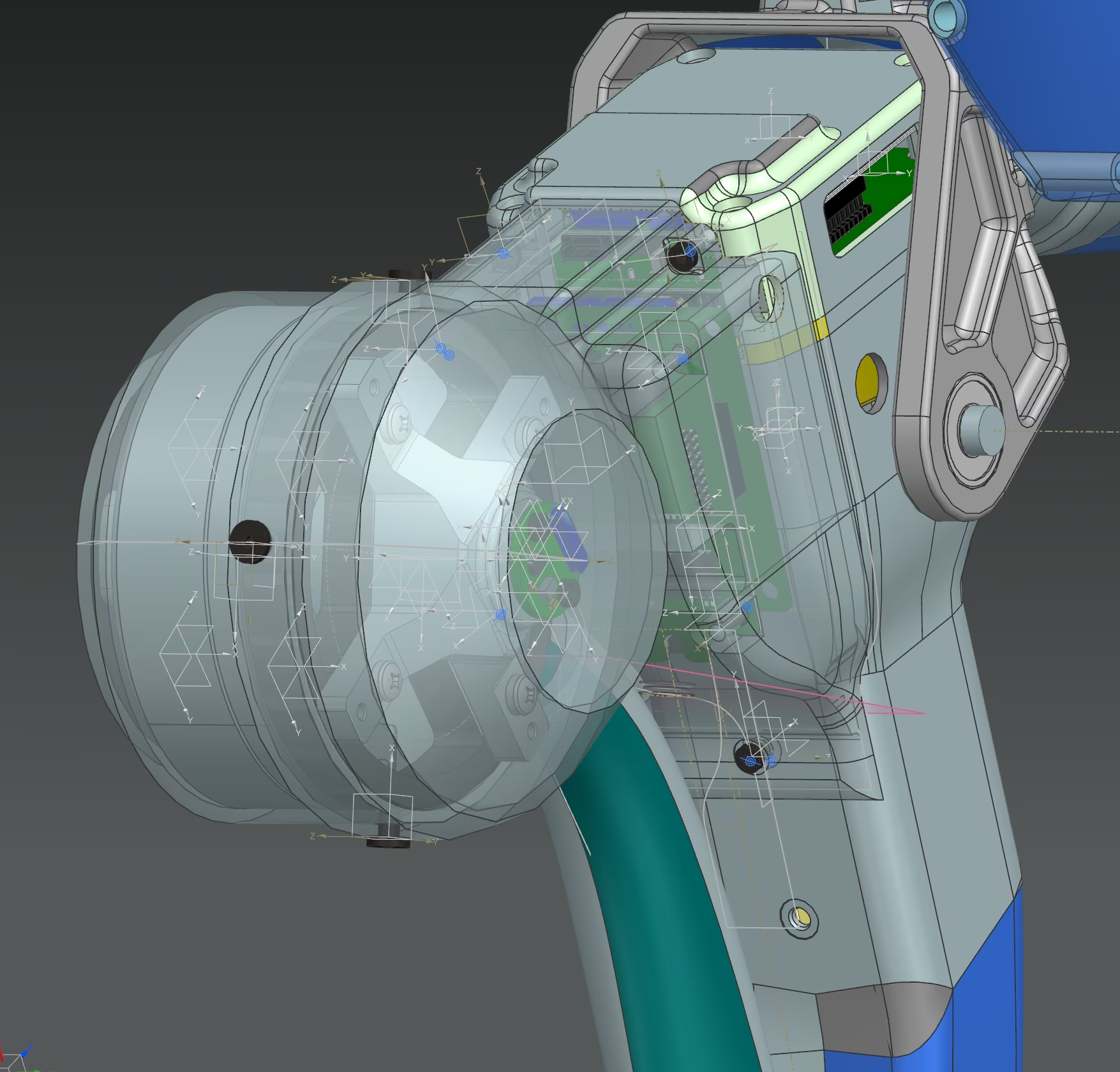
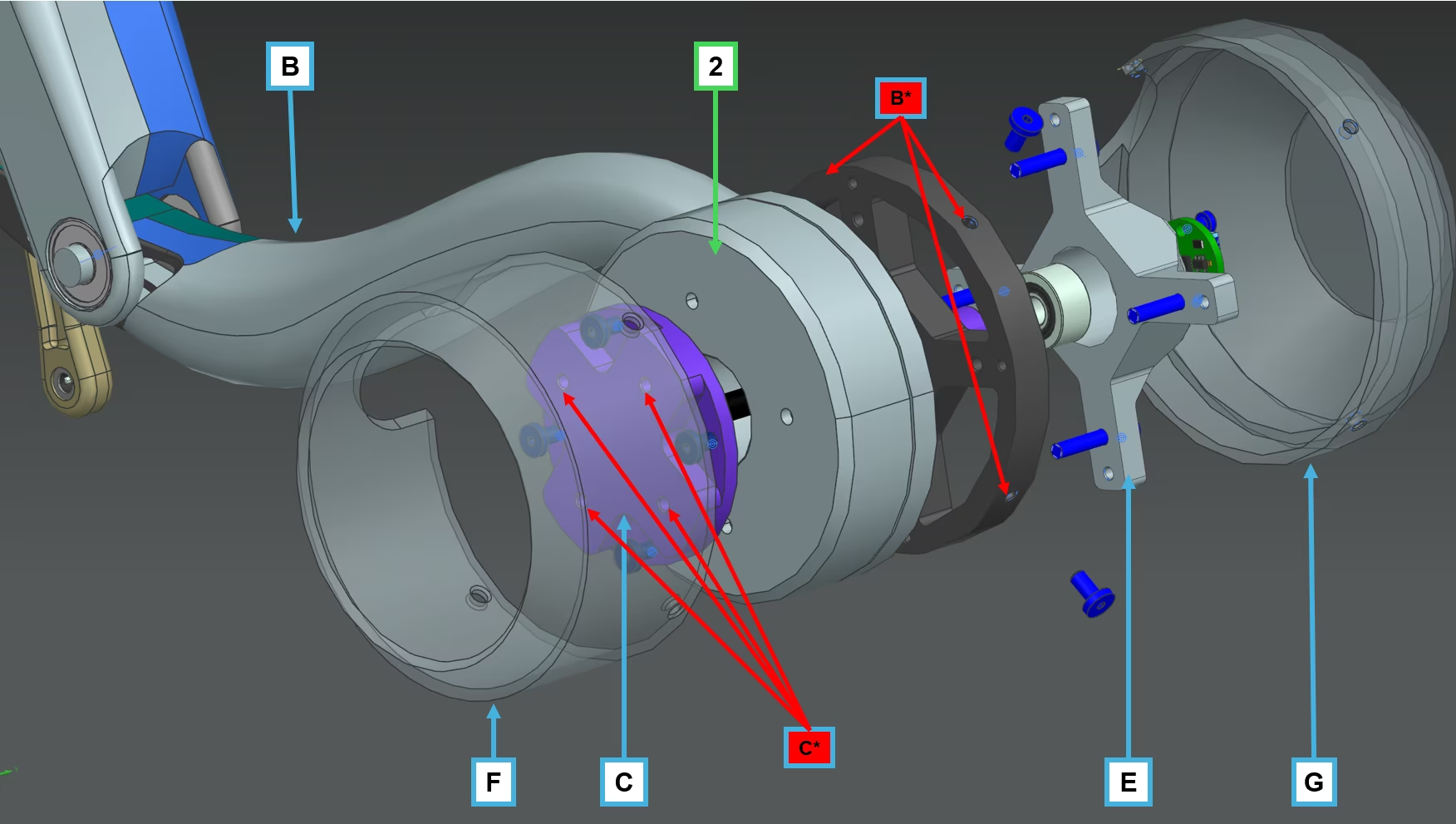
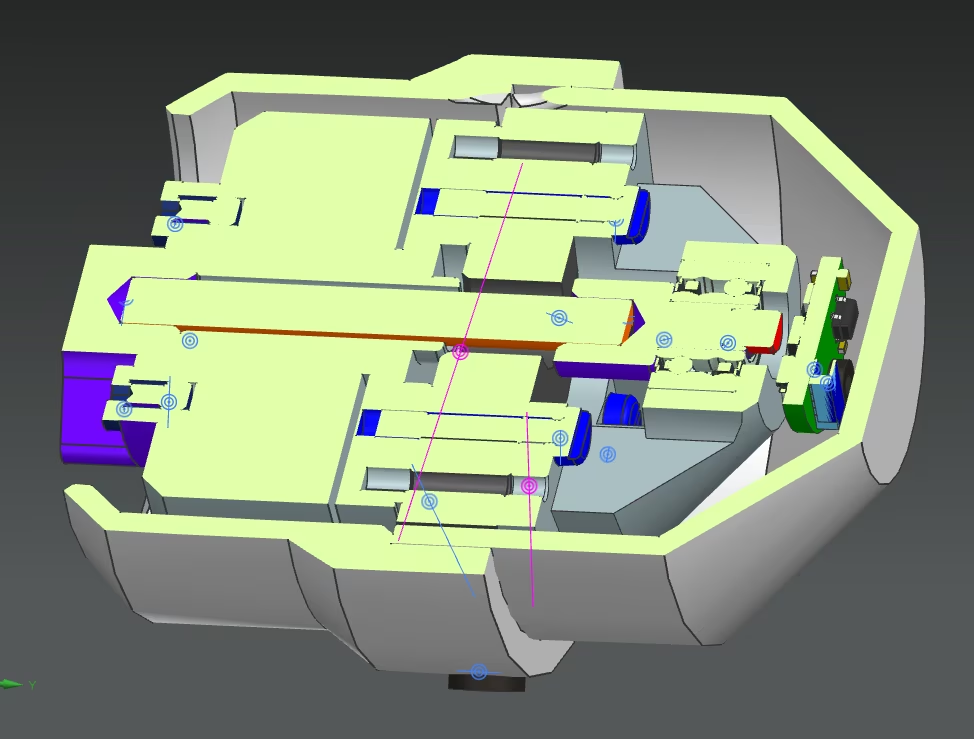
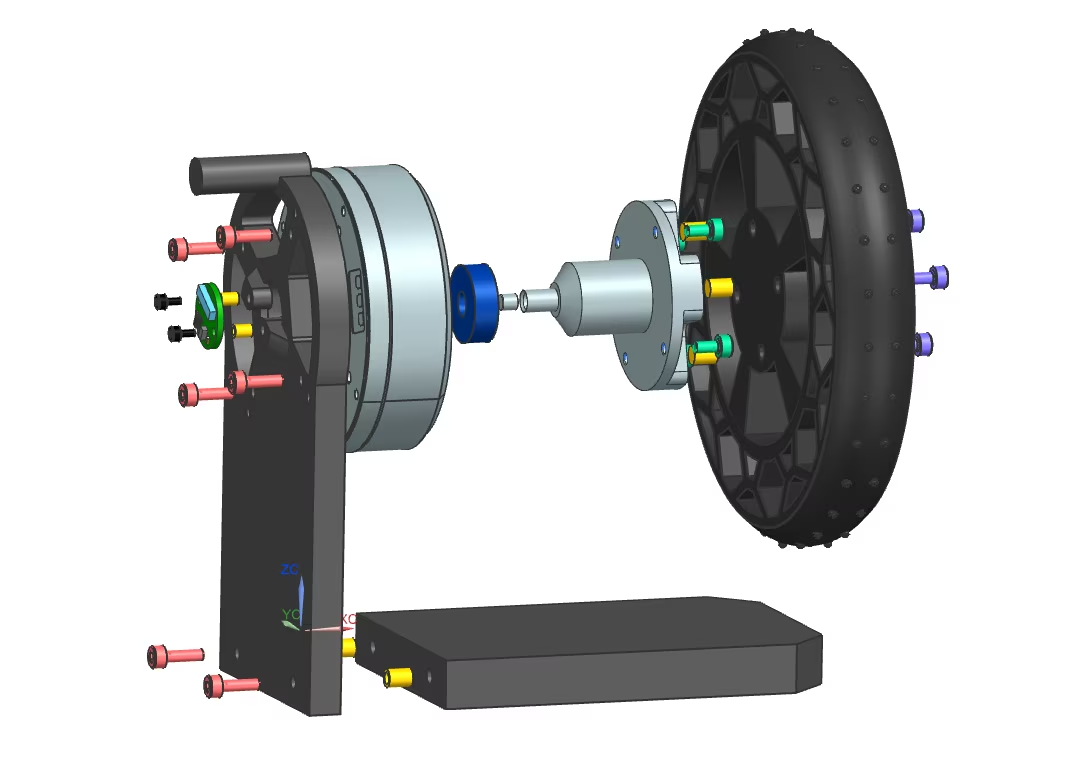
Leg And Motor Integration
I designed new shanks that housed the chosen motor and included Hall-effect sensing for position. That also meant solving the packaging problem for the motor drivers and verifying operation on a custom-built test stand before full integration.
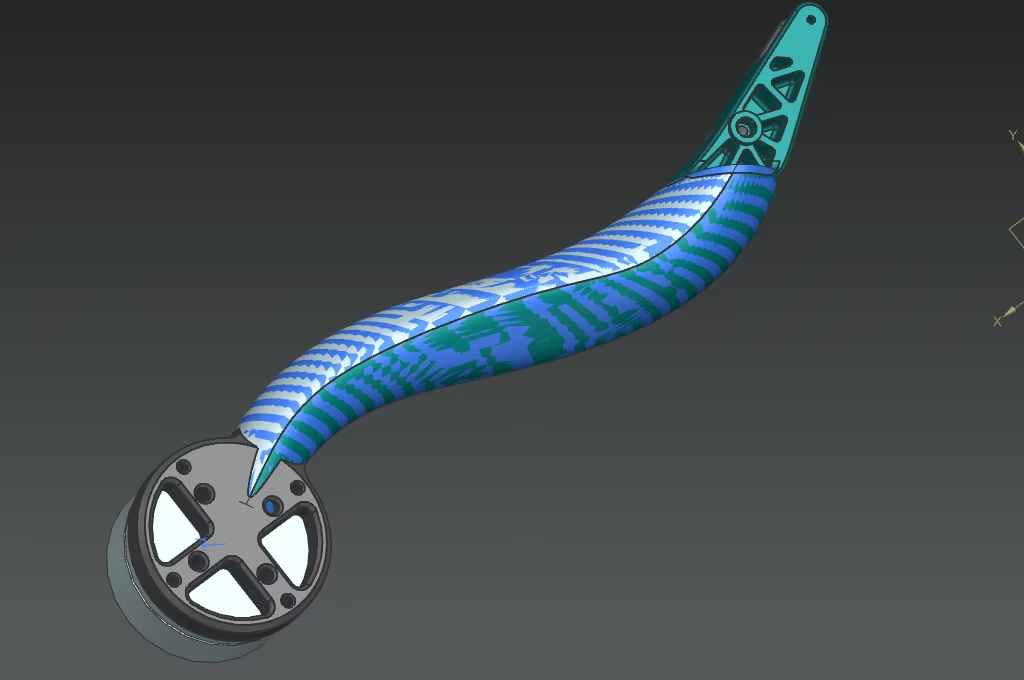
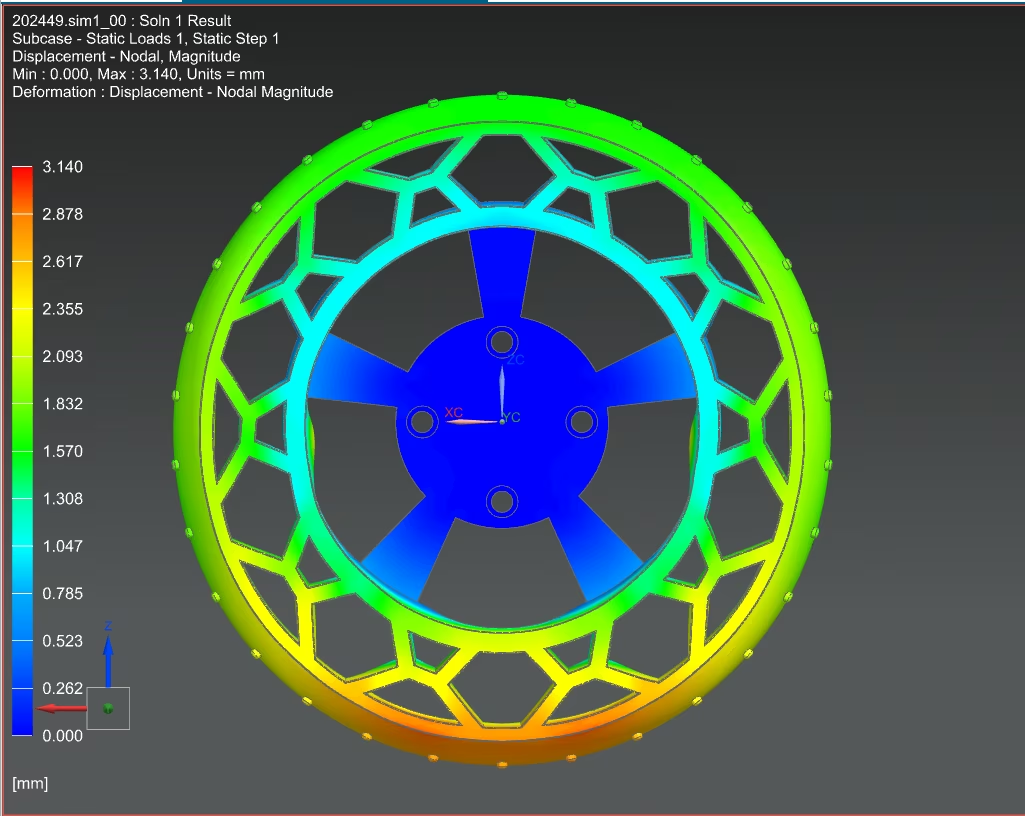
Wheel Design
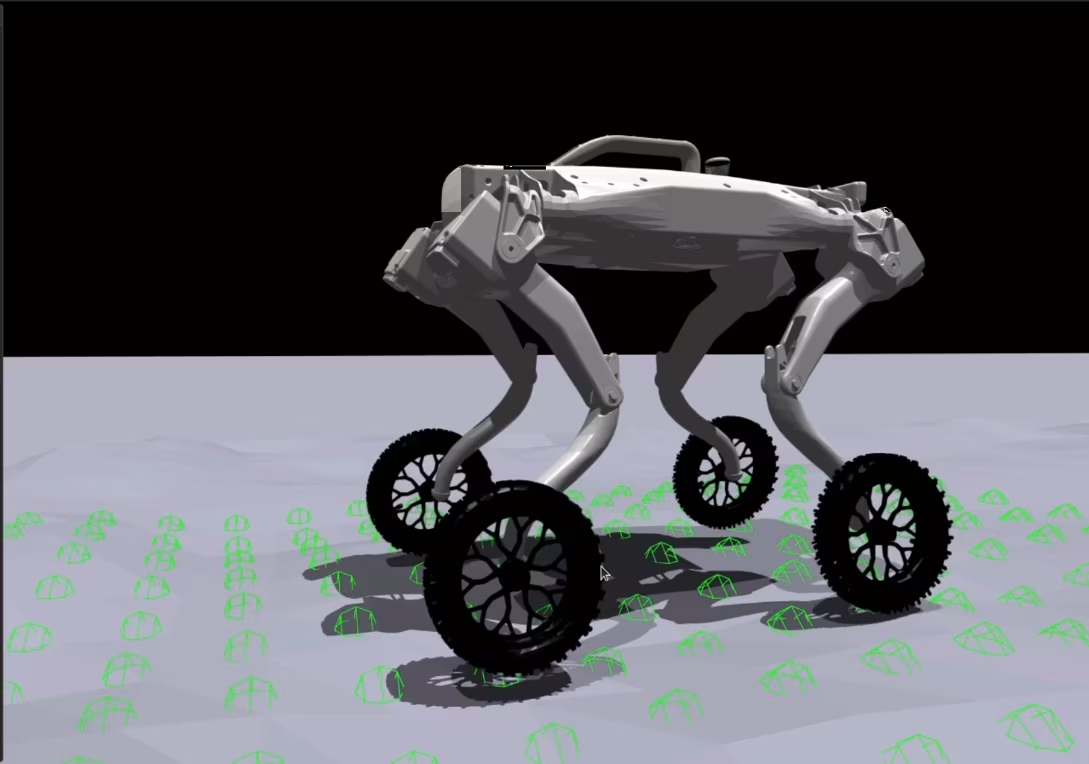
Finding suitable off-the-shelf rubber wheels at this size was surprisingly hard, so I designed my own. After some FEM-driven iteration, I printed TPU wheels and validated the concept against the rest of the drivetrain and leg geometry.

Simulation To Software
Once the updated robot was modeled in URDF, I trained a hybrid locomotion policy in Isaac Gym and then carried that work into the real software stack by rewriting the original ROS1 code to ROS2.
