0.0.1 Monte Carlo Simulations (2026-02-02)¶
New Features¶
- simulate framework has been extended to Monte Carlo runs
ADCS.simulate_mcfunctionADCS.MCConfigclass for specifying Monte Carlo configurationsAdded saving and loading for
ADCS.helpers.simresults.SimulationResultsto support Monte Carlo runs
- Added support for quaternion goals, now goals are defined as:
Target row format
Interpretation
[nan, tx, ty, tz]
Direction target expressed in ECI
[q0, q1, q2, q3]
Desired attitude quaternion (Body to ECI)
Added support for goal series with
simulate()usingADCS.GoalListReworked all plotting utilities to be compatible with Monte Carlo results
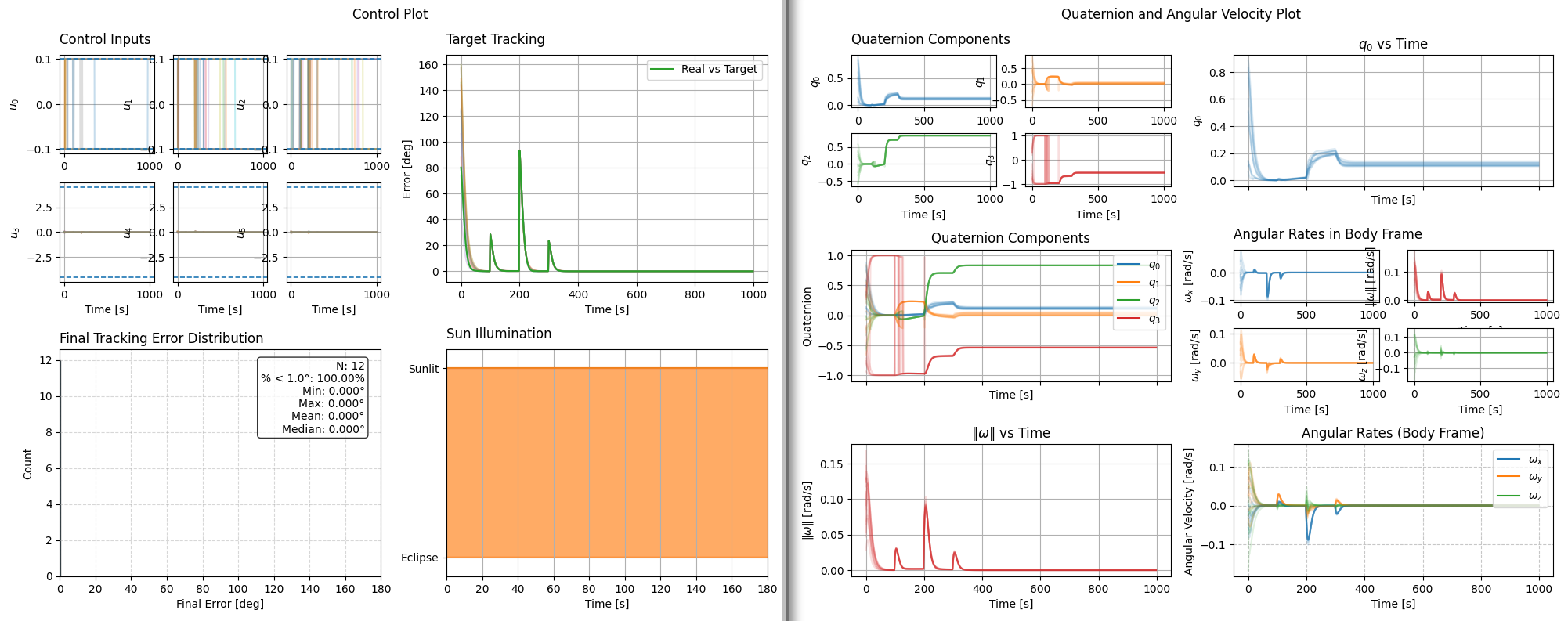
Example: Multi-Goal Monte Carlo Simulation¶
Consider a predefined orbit and goal sequence, with randomized initial states for a 3 MTQ + 3 RW satellite.
import ADCS as ADCS
import numpy as np
import matplotlib.pyplot as plt
np.random.seed(42)
mtm_max_torque = 0.1
mtqs = [ADCS.MTQ(axis=axes, max_torque=mtm_max_torque) for axes in np.eye(3)]
rw_max_torque = 4.51
rw_J = 0.22
rw_h0 = 1
rw_hmax = 3.8
rws = [ADCS.RW(axis=axes, max_torque=rw_max_torque, J=rw_J, h=rw_h0, h_max=rw_hmax) for axes in np.eye(3)]
acts = mtqs+rws
mtms = [ADCS.MTM(axis=axes) for axes in np.eye(3)]
real_sat = ADCS.Satellite(mass=4.0, J_0=np.diagflat([3.4, 2.9, 1.3]), actuators=acts, sensors=mtms, boresight=np.array([0, 0, 1]))
x_0 = np.array([0, 0, 0] + [1, 0, 0, 0] + [0, 0, 0])
controller = ADCS.controller.MTQ_w_RW(est_sat=real_sat, p_gain=0.1, d_gain=0.7, c_gain=0.1, h_target=np.array([0, 0, 0]))
goal_timeline = {0.0: ADCS.goals.Fixed_Attitude_Goal(q_ref=np.array([0, 0, 0, 1])), 100.0: ADCS.goals.Coordinate_Goal(lat=33.75, lon=-84.3885, alt=0), 200.0: ADCS.goals.AntiVelocity_Goal(), 300.0: ADCS.goals.Sun_Goal()}
goallist = ADCS.GoalList(goal_timeline=goal_timeline, time_units="seconds", start_juliantime=0.22)
os0 = ADCS.Orbital_State(ephem=ADCS.Ephemeris(),J2000=0.22, R=np.array([7000, 0, 0]), V=np.array([0, 7.5, 0]))
mc_config = ADCS.MCConfig(
w = lambda rng: ADCS.helpers.normalize(rng.standard_normal(3)) * (rng.uniform(0.1, 1.0) * np.pi / 180.0),
q = lambda rng: ADCS.helpers.normalize(rng.standard_normal(4)),
h = lambda rng: rng.uniform(-1, 1, size=3),
)
mc_results = ADCS.simulate_mc(
x=x_0,
satellite=real_sat,
controller=controller,
goal=goallist,
os0=os0,
dt=1.0,
tf=1000.0,
mc_config=mc_config,
num_runs=12,
base_seed=42,
)
ADCS.plot(
mc_results,
ADCS.plots.ControlPlot(),
ADCS.plots.TargetPlot(modes=["real_target"]),
ADCS.plots.TargetHistogram(),
ADCS.plots.IlluminationPlot(),
layout=(2,2),
title="Control Plot",
)
ADCS.plot(
mc_results,
ADCS.plots.QuaternionPlot(),
ADCS.plots.QuaternionPlotSingle(component=0),
ADCS.plots.QuaternionPlotCombined(),
ADCS.plots.AngularVelocityPlot(),
ADCS.plots.AngularVelocityPlotSingle(component="m"),
ADCS.plots.AngularVelocityPlotCombined(),
layout=(3,2),
title="Quaternion and Angular Velocity Plot",
)
plt.show()
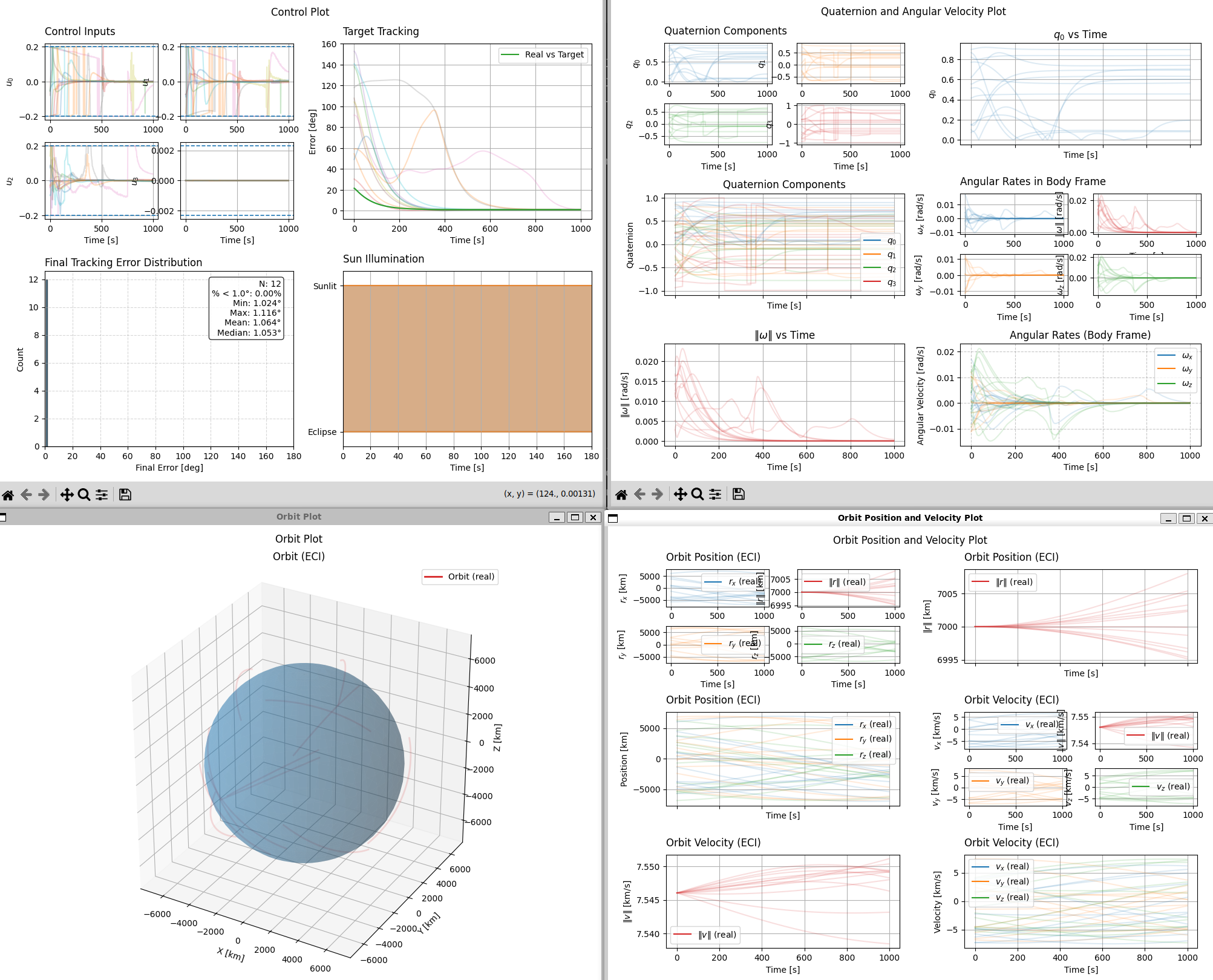
Example: Vector Goal Monte Carlo Simulation¶
Consider random circular orbits, initial attitudes, and vector goals for a 3 MTG + 1 RW satellite.
import ADCS as ADCS
import numpy as np
import matplotlib.pyplot as plt
np.random.seed(42)
mtm_max_torque = 0.1
mtqs = [ADCS.MTQ(axis=axes, max_torque=mtm_max_torque) for axes in np.eye(3)]
rw_max_torque = 4.51
rw_J = 0.22
rw_h0 = 1
rw_hmax = 3.8
rws = [ADCS.RW(axis=axes, max_torque=rw_max_torque, J=rw_J, h=rw_h0, h_max=rw_hmax) for axes in np.eye(3)]
acts = mtqs+rws
mtms = [ADCS.MTM(axis=axes) for axes in np.eye(3)]
real_sat = ADCS.Satellite(mass=4.0, J_0=np.diagflat([3.4, 2.9, 1.3]), actuators=acts, sensors=mtms, boresight=np.array([0, 0, 1]))
x_0 = np.array([0, 0, 0] + [1, 0, 0, 0] + [0, 0, 0])
controller = ADCS.controller.MTQ_w_RW(est_sat=real_sat, p_gain=0.1, d_gain=0.7, c_gain=0.1, h_target=np.array([0, 0, 0]))
goal_timeline = {0.0: ADCS.goals.Fixed_Attitude_Goal(q_ref=np.array([0, 0, 0, 1])), 100.0: ADCS.goals.Coordinate_Goal(lat=33.75, lon=-84.3885, alt=0), 200.0: ADCS.goals.AntiVelocity_Goal(), 300.0: ADCS.goals.Sun_Goal()}
goallist = ADCS.GoalList(goal_timeline=goal_timeline, time_units="seconds", start_juliantime=0.22)
os0 = ADCS.Orbital_State(ephem=ADCS.Ephemeris(),J2000=0.22, R=np.array([7000, 0, 0]), V=np.array([0, 7.5, 0]))
mc_config = ADCS.MCConfig(
w = lambda rng: ADCS.helpers.normalize(rng.standard_normal(3)) * (rng.uniform(0.1, 1.0) * np.pi / 180.0),
q = lambda rng: ADCS.helpers.normalize(rng.standard_normal(4)),
h = lambda rng: rng.uniform(-1, 1, size=3),
)
mc_results = ADCS.simulate_mc(
x=x_0,
satellite=real_sat,
controller=controller,
goal=goallist,
os0=os0,
dt=1.0,
tf=1000.0,
mc_config=mc_config,
num_runs=12,
base_seed=42,
)
ADCS.plot(
mc_results,
ADCS.plots.ControlPlot(),
ADCS.plots.TargetPlot(modes=["real_target"]),
ADCS.plots.TargetHistogram(),
ADCS.plots.IlluminationPlot(),
layout=(2,2),
title="Control Plot",
)
ADCS.plot(
mc_results,
ADCS.plots.QuaternionPlot(),
ADCS.plots.QuaternionPlotSingle(component=0),
ADCS.plots.QuaternionPlotCombined(),
ADCS.plots.AngularVelocityPlot(),
ADCS.plots.AngularVelocityPlotSingle(component="m"),
ADCS.plots.AngularVelocityPlotCombined(),
layout=(3,2),
title="Quaternion and Angular Velocity Plot",
)
plt.show()