06: Trajectory Planner (Plan-and-Track)¶
In this tutorial, we solve a challenging magnetic attitude-control problem for BeaverCube 1: quick retargeting with only 3 magnetorquers (MTQs) and no reaction wheels.
The scenario uses the Plan-and-Track controller with trajectory optimization and TVLQR tracking. This controller assumes high-fidelity field knowledge during planning, which can improve accuracy for aggressive maneuvers.
A trajectory planner computes a feasible, optimized reference trajectory that the spacecraft can track while satisfying actuator limits and pointing objectives.
For more details on related trajectory optimization methods, see SALTRO documentation website.
Component |
Description |
|---|---|
Satellite |
BeaverCube 1 generated from the built-in satellite factory. |
Actuation |
3 MTQ-only attitude control (underactuated, no reaction wheels). |
Controller |
Plan-and-Track LQR with trajectory optimization settings and two solver passes. |
Planner Costs |
Tuned angle and angular-rate weights for trajectory and TVLQR tracking. |
Goals |
Piecewise inertial pointing timeline with target and no-goal intervals. |
Orbit |
Circular-like LEO test orbit initialized from position and velocity vectors. |
import os
import sys
sys.path.append(os.path.abspath(os.path.join(__file__, "../../..")))
import ADCS as ADCS
import numpy as np
import matplotlib.pyplot as plt
satellite = ADCS.satellite_factory.create_beavercube1_cubesat()
x_0 = np.array([0, 0, 0] + [1, 0, 0, 0]) # w, q, h
planner_settings = ADCS.controller.plan_and_track.PlannerSettings(est_sat=satellite, bdot_on=0, dt_tp=50, dt_tvlqr=1.0)
planner_settings.verbosity = False
planner_settings.cost_main.use_full_cost_hessian = True
planner_settings.pass1.regularization.use_dynamics_hess = 1
planner_settings.init_traj.bdot_gain = 500
planner_settings.pass1.aug_lag.penalty_init = 1e-3
planner_settings.pass1.aug_lag.penalty_scale = 10
planner_settings.pass1.convergence.max_outer_iter = 15
planner_settings.pass1.convergence.max_inner_iter = 40
planner_settings.pass2.aug_lag.penalty_init = 1e5
planner_settings.pass2.aug_lag.penalty_scale = 10
planner_settings.pass2.convergence.max_outer_iter = 8
planner_settings.pass2.convergence.max_inner_iter = 20
planner_settings.cost_main = ADCS.controller.plan_and_track.CostWeights(
angle=1e1,
angle_N=1e1,
ang_vel=1e5,
ang_vel_N=1e5,
ang_vel_err_dir=1e2,
ang_vel_err_dir_N=0.0,
ang_vel_mag=0.0,
ang_vel_mag_N=0.0,
control_mult=1.0,
ang_cost_func_type=2,
)
planner_settings.cost_second = planner_settings.cost_main
planner_settings.cost_tvlqr = ADCS.controller.plan_and_track.CostWeights(
angle=1e5,
angle_N=1e6,
ang_vel=1e6,
ang_vel_N=1e8,
ang_vel_mag=0.0,
ang_vel_mag_N=0.0,
control_mult=1.0,
ang_cost_func_type=2,
)
controller = ADCS.controller.Plan_and_Track_LQR(est_sat=satellite, planner_settings=planner_settings)
os0 = ADCS.Orbital_State(ephem=ADCS.Ephemeris(), J2000=0.22, R=np.array([5000, 0, 5000]), V=np.array([0, 7.5, 0]))
goal_timeline = {0.0: ADCS.goals.ECI_Goal(np.array([1, 0, 0])), 300.0: ADCS.goals.No_Goal(), 400.0: ADCS.goals.ECI_Goal(np.array([0, 1, 0])), 700.0: ADCS.goals.No_Goal(), 800.0: ADCS.goals.ECI_Goal(np.array([0, 0, 1]))}
goallist = ADCS.GoalList(goal_timeline=goal_timeline, time_units="seconds", start_juliantime=0.22)
results = ADCS.simulate(
x=x_0,
satellite=satellite,
controller=controller,
goal=goallist,
os0=os0,
dt=1.0,
tf=1000.0
)
ADCS.plot(
results,
ADCS.plots.AnimationPlot(),
layout=(1,1),
title="3+1 ALTRO Reduced",
)
ADCS.plot(
results,
ADCS.plots.AttitudePlot(sources=["real", "reference"]),
layout=(1,1),
title="3+0 ALTRO Mixed",
)
ADCS.plot(
results,
ADCS.plots.AngularVelocityPlotCombined(sources=["real"]),
ADCS.plots.ControlPlotCombined(title="Magnetorquer Commands", units="Am²"),
ADCS.plots.TargetHistogram(bin_width=5.0),
ADCS.plots.TargetPlot(modes=["real_target"], title="Target Tracking"),
layout=(2,2),
title="3+0 ALTRO Mixed",
)
ADCS.plot(
results,
ADCS.plots.ControlPlotSingle(index=0, title="Magnetorquer 1", units="Am²"),
ADCS.plots.ControlPlotSingle(index=1, title="Magnetorquer 2", units="Am²"),
ADCS.plots.ControlPlotSingle(index=2, title="Magnetorquer 3", units="Am²"),
layout=(3,1),
title="3+0 ALTRO Mixed",
)
plt.show()
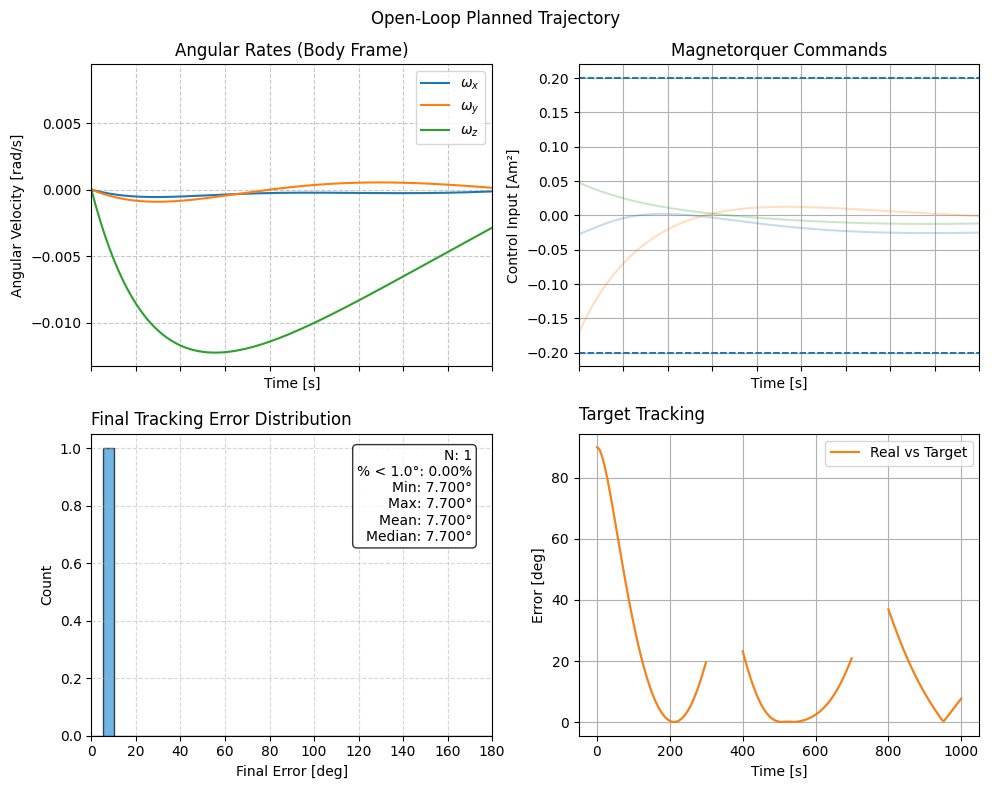
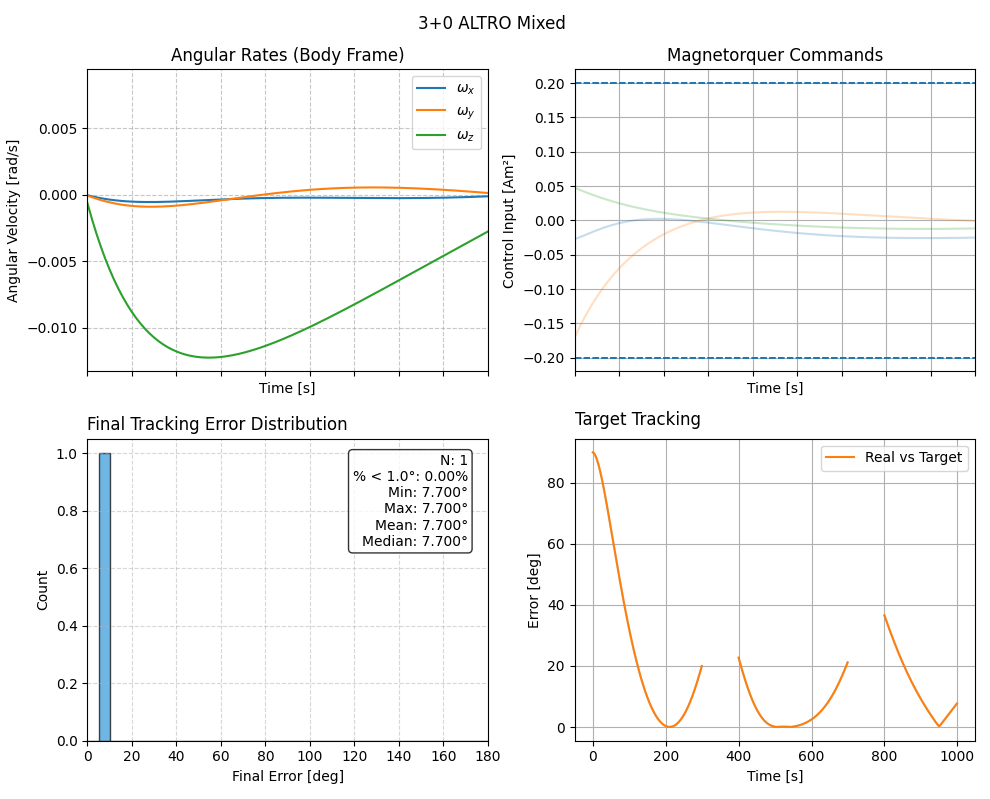
This Plan-and-Track setup is accurate but computationally heavier, which is expected for an optimization-based controller with strong field knowledge assumptions.
Simulation Results¶
|
|
How To Run¶
Install and build prerequisites:
Then run:
python examples/tutorials/06_trajectory_planner.py