03: Simple Estimation¶
All previous examples assumed perfect state knowledge of the satellite. The package provides different estimators to use with various sensors and configurations.
Consider the TRMM (Tropical Rainfall Measuring Mission) satellite, launched by NASA and JAXA in 1997. We will model the satellite with some of its sensors and try to build a simple estimator around it.
Component |
Description |
|---|---|
Sensors |
|
Satellite |
Mass of 3000 kg, Inertia Matrix \(J_0 = diag([500, 1500, 1500]) \, kg \cdot m^{2}\). |
Initial State |
The real initial state is set to an angular velocity of \([0.001, 0.001, -0.002] \, rad/s\) and an attitude represented by quaternion \([0.2588, 0, 0.9659, 0]\). |
Estimated Sensors |
|
Estimated Satellite |
Mass of 3200 kg, Inertia Matrix \(J_0 = diag([450, 1400, 1400]) \, kg \cdot m^{2}\). |
Estimated Initial State |
The estimated initial state is set to an angular velocity of \([0, 0, 0] \, rad/s\) and an attitude represented by quaternion \([1, 0, 0, 0]\). |
Estimator |
SRUAKF (Square Root Unscented Kalman Filter) with tuned initial covariance and process noise matrices. |
Orbital State |
The initial position and velocity of the spacecraft in orbit. |
Disturbances |
Include Gravity Gradient disturbance torque on both the real and estimated satellite models. |
import os
import sys
sys.path.append(os.path.abspath(os.path.join(__file__, "../../..")))
import ADCS as ADCS
import numpy as np
from scipy.linalg import block_diag
import matplotlib.pyplot as plt
dt = 20.0
# Real Satellite
gyro_noise = ADCS.Noise(std_noise=3.1623e-7)
sens = [ADCS.Gyro(axis, noise=gyro_noise) for axis in np.eye(3)]
mtm_noise = ADCS.Noise(std_noise=5e-8)
sens += [ADCS.MTM(axis, noise=mtm_noise) for axis in np.eye(3)]
sun_noise = ADCS.Noise(std_noise=2e-3)
sens += [ADCS.SunPair(axis, efficiency=0.3,noise=sun_noise) for axis in np.eye(3)]
gg_dist = [ADCS.disturbances.GG_Disturbance()]
satellite = ADCS.Satellite(mass=3000, J_0=np.diag([500, 1500, 1500]), sensors=sens, disturbances=gg_dist)
x_0 = np.array([0.001, 0.001, -0.002] + [0.2588, 0, 0.9659, 0]) # w, q
# Estimated Satellite
est_gyro_noise = ADCS.Noise(std_noise=5e-7)
est_sens = [ADCS.Gyro(axis, noise=est_gyro_noise) for axis in np.eye(3)]
est_mtm_noise = ADCS.Noise(std_noise=5e-8)
est_sens += [ADCS.MTM(axis, noise=est_mtm_noise) for axis in np.eye(3)]
est_sun_noise = ADCS.Noise(std_noise=1e-3)
est_sens += [ADCS.SunPair(axis, efficiency=0.3, noise=est_sun_noise) for axis in np.eye(3)]
est_gg_dist = [ADCS.disturbances.GG_Disturbance()]
est_satellite = ADCS.EstimatedSatellite(mass=3200, J_0=np.diag([450, 1400, 1400]), sensors=est_sens, disturbances=est_gg_dist)
x_hat = np.array([0, 0, 0] + [1, 0, 0, 0]) # w, q
# Estimator
P_hat = block_diag(
np.eye(3)*(0.01)**2, # Angular Velocity Initial State Error
np.eye(3), # Attitude (MRP) Initial State Error
)
Q_hat = block_diag(
np.eye(3)*(1e-8)**2.0,
1e-8*np.eye(3)
)
estimator = ADCS.SRUAKF(J2000=0.22, est_sat=est_satellite, x_hat=x_hat, P_hat=P_hat, Q_hat=Q_hat, dt=dt, cross_term=True, quat_as_vec=False)
os0 = ADCS.Orbital_State(ephem=ADCS.Ephemeris(), J2000=0.22, R=np.array([5000, 0, 5000]), V=np.array([0, -7.5, 0]))
results = ADCS.simulate(
x=x_0,
satellite=satellite,
est_satellite=est_satellite,
estimator=estimator,
os0=os0,
dt=dt,
tf=5000.0
)
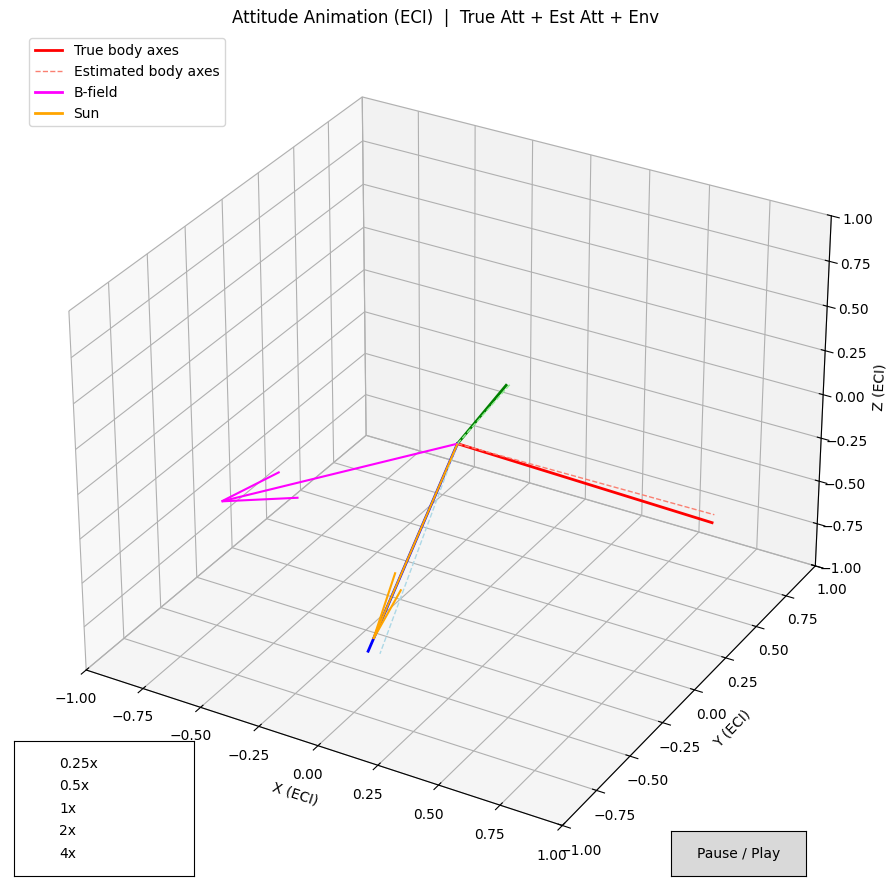
ADCS.plot(
results,
ADCS.plots.AttitudePlot(sources=["real", "estimated"]),
layout=(1,1),
title="Estimator Convergence",
)
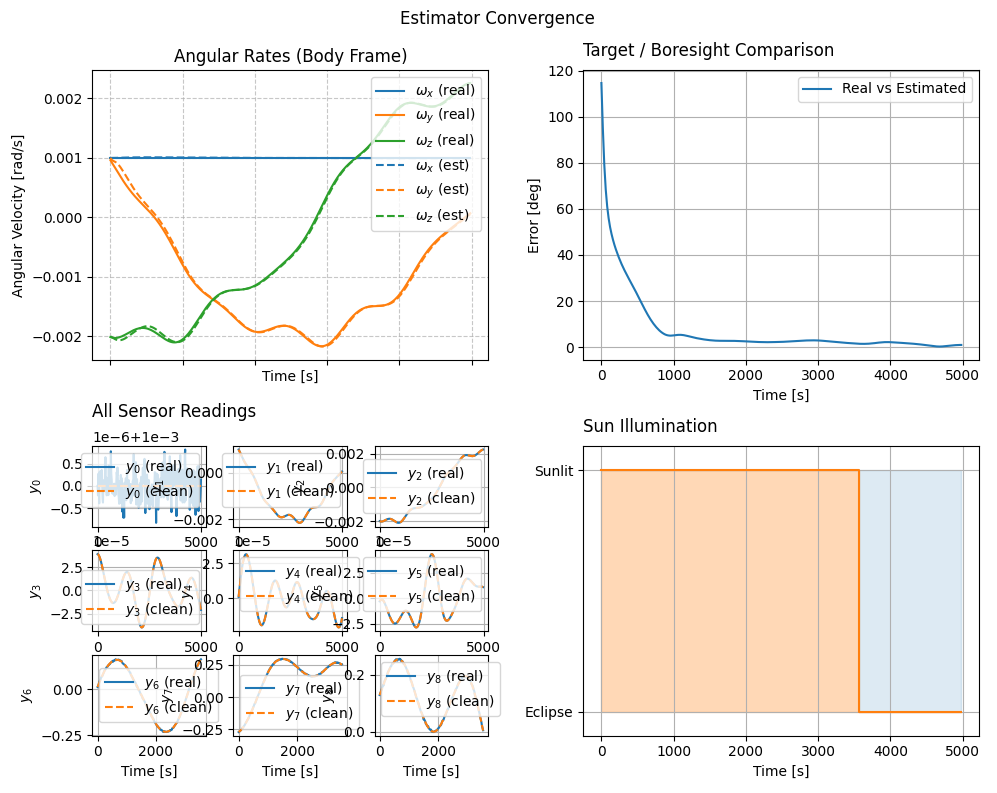
ADCS.plot(
results,
ADCS.plots.AngularVelocityPlotCombined(sources=["real", "estimated"]),
ADCS.plots.TargetPlot(modes=["real_est"]),
ADCS.plots.SensorsPlot(title="All Sensor Readings", sources=["real", "clean"]),
ADCS.plots.IlluminationPlot(),
layout=(2,2),
title="Estimator Convergence",
)
plt.show()
Note that in the configuration, we may not have perfect knowledge of the satellite’s mass and inertia properties, as well as the sensor characteristics. The estimator is able to converge to the true state over time despite these uncertainties, as shown in the plots below.
|
|