0.0.2 Multi-Boresight (2026-02-23)¶
New Features¶
- Multi-Boresight Support: Satellites can now define multiple named boresights for different payloads and instruments
Boresight argument now accepts a dictionary mapping names to 3D vectors
Goals can reference specific boresights via the
boresight_nameparameterFully backward compatible with single boresights (
np.ndarray)
- Backward Compatibility
Passing
np.ndarrayas a boresight: automatically registered as"default"Passing
None: defaults to(0, 0, 1)and registered as"default"
Added
boresight_histfield to simulation results in bothADCS.simulateandADCS.simulate_mc
Example: Multi-Boresight Single-Run Simulation¶
Consider a satellite with multiple instruments pointing in different directions, using a fixed-attitude goal followed by goals that reference specific boresights.
import ADCS as ADCS
import numpy as np
import matplotlib.pyplot as plt
np.random.seed(42)
mtm_max_torque = 0.1
mtqs = [ADCS.MTQ(axis=axes, max_torque=mtm_max_torque) for axes in np.eye(3)]
rw_max_torque = 4.51
rw_J = 0.22
rw_h0 = 1
rw_hmax = 3.8
rws = [ADCS.RW(axis=axes, max_torque=rw_max_torque, J=rw_J, h=rw_h0, h_max=rw_hmax) for axes in np.eye(3)]
acts = mtqs + rws
mtms = [ADCS.MTM(axis=axes) for axes in np.eye(3)]
# Define multiple boresights for different instruments
boresights = {
"camera": np.array([0, 0, 1]),
"solar_panel": np.array([1, 0, 0])
}
real_sat = ADCS.Satellite(
mass=4.0,
J_0=np.diagflat([3.4, 2.9, 1.3]),
actuators=acts,
sensors=mtms,
boresight=boresights
)
x_0 = np.array([0, 0, 0] + [1, 0, 0, 0] + [0, 0, 0])
controller = ADCS.controller.MTQ_w_RW(
est_sat=real_sat,
p_gain=0.1,
d_gain=0.7,
c_gain=0.1,
h_target=np.array([0, 0, 0])
)
# Define goals that reference specific boresights
goal_timeline = {
0.0: ADCS.goals.Fixed_Attitude_Goal(q_ref=np.array([0, 0, 0, 1])),
100.0: ADCS.goals.Coordinate_Goal(lat=33.75, lon=-84.3885, alt=0, boresight_name="camera"),
200.0: ADCS.goals.AntiVelocity_Goal(boresight_name="solar_panel"),
300.0: ADCS.goals.Sun_Goal(boresight_name="solar_panel")
}
goallist = ADCS.GoalList(
goal_timeline=goal_timeline,
time_units="seconds",
start_juliantime=0.22
)
os0 = ADCS.Orbital_State(
ephem=ADCS.Ephemeris(),
J2000=0.22,
R=np.array([7000, 0, 0]),
V=np.array([0, 7.5, 0])
)
results = ADCS.simulate(
x=x_0,
satellite=real_sat,
controller=controller,
goal=goallist,
os0=os0,
dt=1.0,
tf=1000.0
)
ADCS.plot(
results,
ADCS.plots.ControlPlot(),
ADCS.plots.TargetPlot(modes=["real_target"]),
ADCS.plots.TargetHistogram(),
ADCS.plots.IlluminationPlot(),
layout=(2, 2),
title="Control Plot",
)
plt.show()
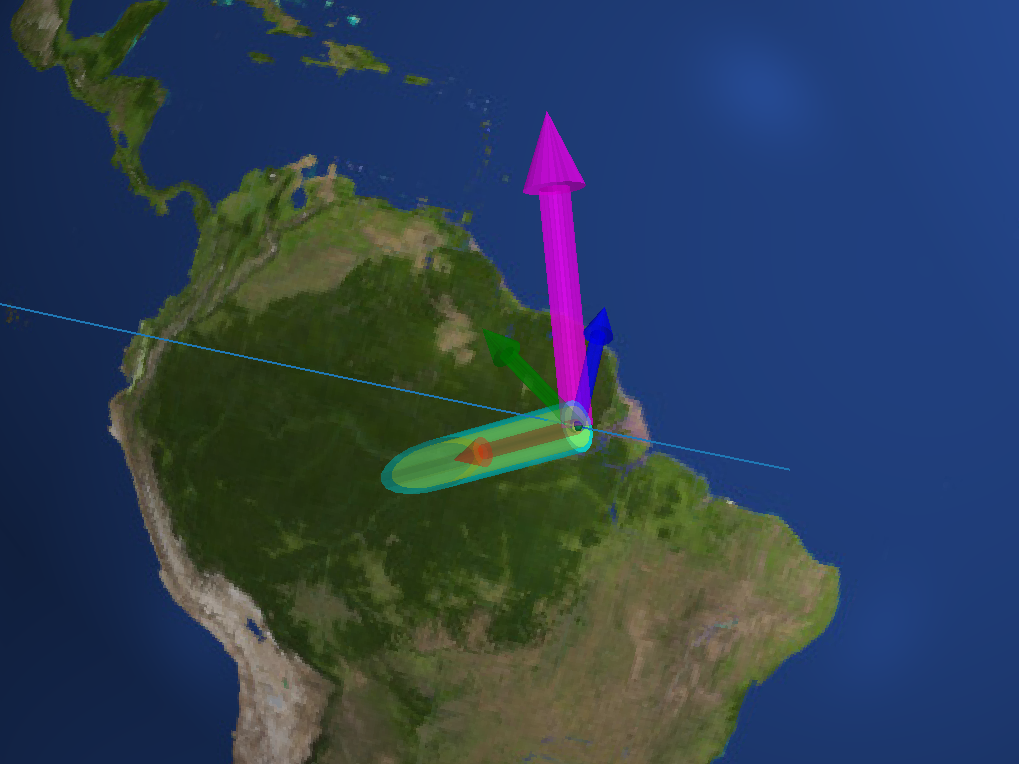
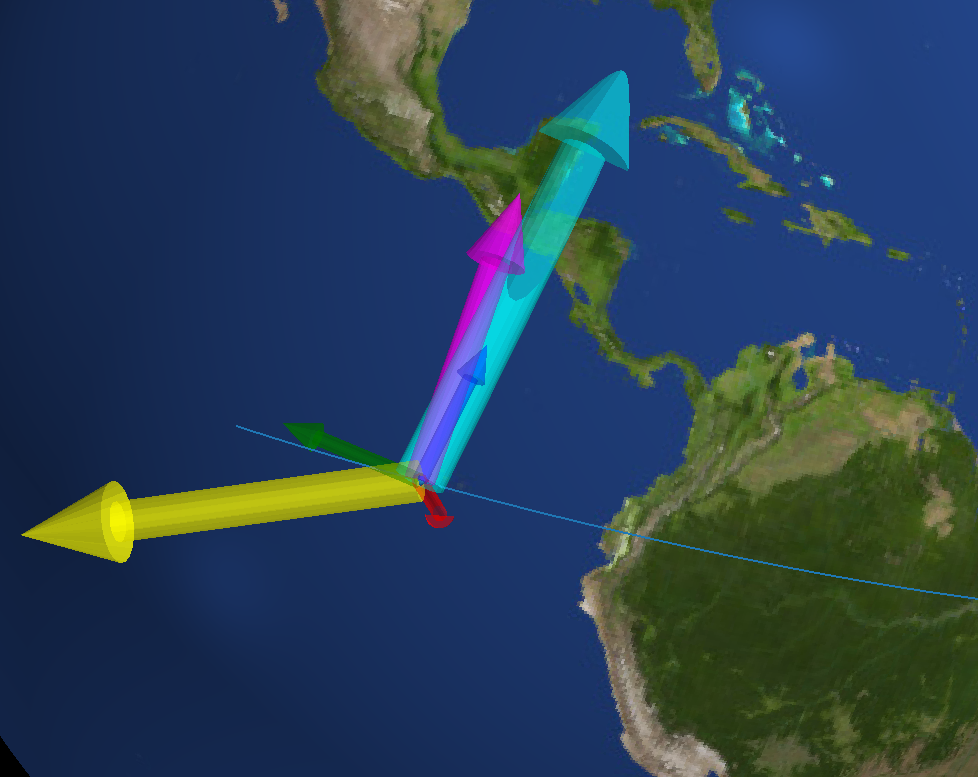
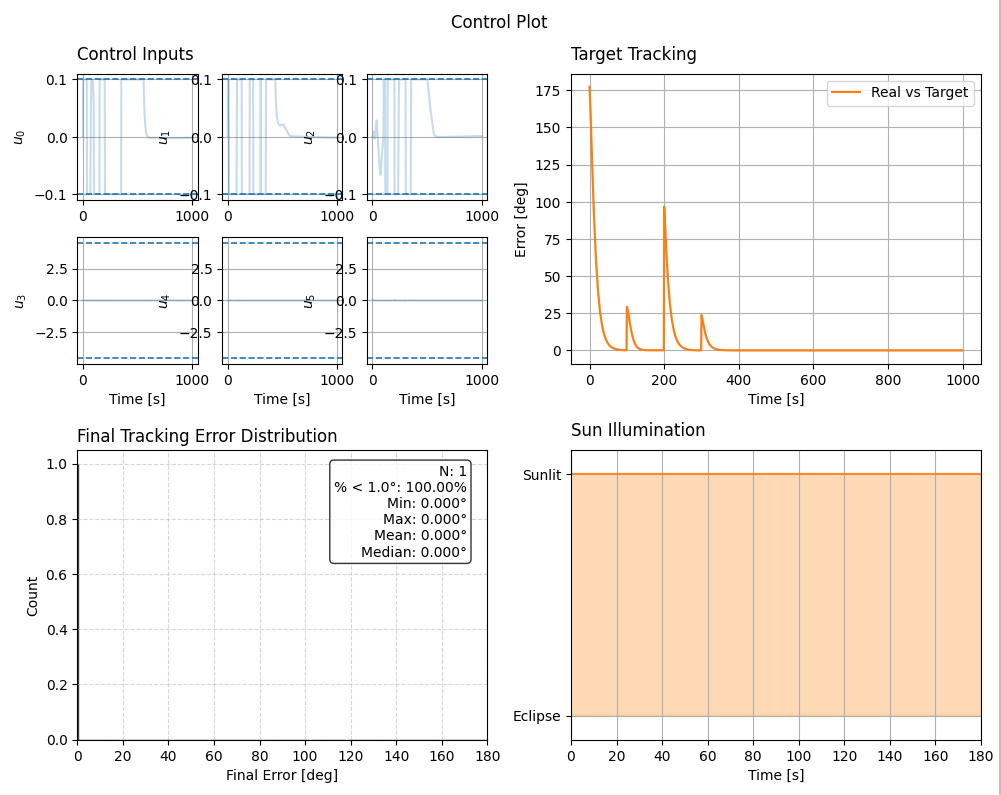
As can be seen in the plots, the satellite successfully aligns with the camera boresight during the coordinate goal and then reorients to align the solar panel boresight for the anti-velocity and sun goals, demonstrating the multi-boresight functionality in action.
Backward Compatibility¶
The multi-boresight feature is fully backward compatible:
Single boresight as ``np.ndarray``:
real_sat = ADCS.Satellite(
mass=4.0,
J_0=np.diagflat([3.4, 2.9, 1.3]),
actuators=acts,
sensors=mtms,
boresight=np.array([0, 0, 1]) # Automatically named "default"
)
No boresight specified:
real_sat = ADCS.Satellite(
mass=4.0,
J_0=np.diagflat([3.4, 2.9, 1.3]),
actuators=acts,
sensors=mtms
# boresight defaults to (0, 0, 1) as "default"
)
Both forms register the boresight as "default", allowing goals to use boresight_name="default" or rely on the default behavior when no boresight name is specified.