0.1.3 Hardware-in-the-loop Remote Execution (2026-04-18)¶
Generalized_ADCS now supports a practical hardware-in-the-loop style workflow for distributed simulation across two machines, such as a main PC and a Raspberry Pi. The primary use case is running selected ADCS components remotely while preserving environment and dynamics propagation on the main computer.
New Functionalities¶
Added remote execution support for controller, attitude estimator, and orbit estimator components via configurable local/remote placement.
Added universal remote server entry point for serving one or more ADCS components from a single endpoint.
Added component placement configuration through
RemoteSimulationConfigwith host/port, timeout, and retry control.Added remote timing summary output in simulation runs to inspect wall-clock, communication, and server-side computation performance.
Added complete setup tutorial with networking instructions and run steps: Tutorial 08: Remote Execution.
Execution View¶
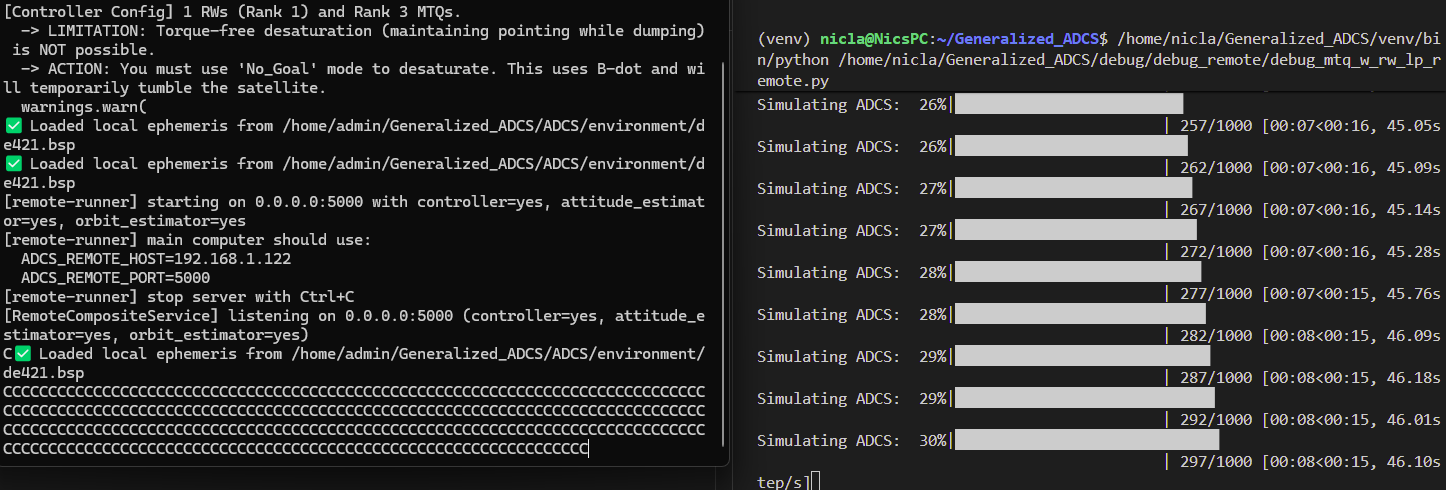
The image below shows the intended dual-terminal workflow: one terminal on the
Raspberry Pi running the remote server, and one terminal on the main PC running
simulate_remote.
Developer Notes¶
This feature enables incremental offloading. You can start with a controller-only remote setup and later move attitude and orbit estimators remotely as needed, without changing core environment propagation responsibilities on the main PC.