02: Noisy Control¶
We consider the SwissCube CubeSat launched by the EPFL Space Center in 2009 and still in operation.
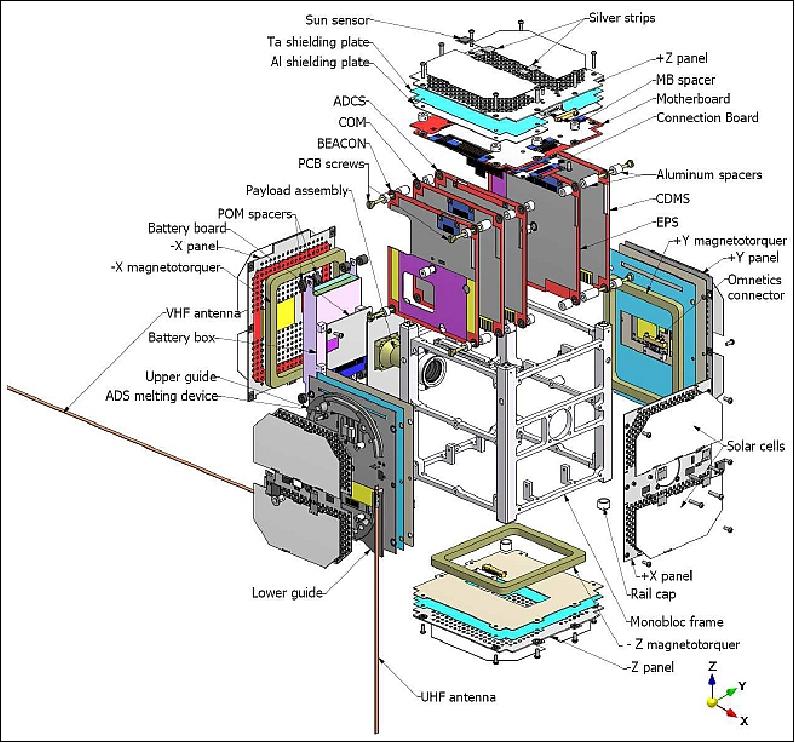
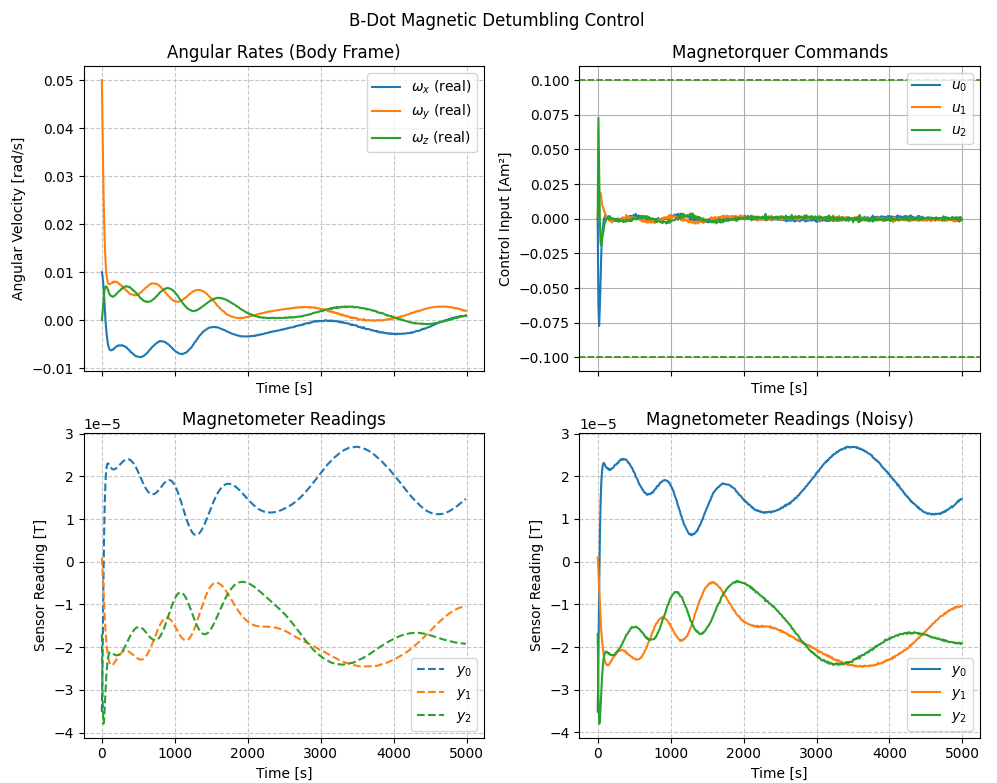
SwissCube is a small 1U CubeSat with a simple actuator layout of 3 magnetorquers (MTQs). We will simulate detumbling the CubeSat from an initial angular velocity in the presence of sensor and actuator noise.
Component |
Description |
|---|---|
Actuators |
Set of 3 Magnetorquers (MTQ), with maximum strength 0.1 Am² and noise standard deviation of 0.005 Am². |
Sensors |
Set of 3 Magnetometers (MTM), with noise standard deviation of 1e-7 T. |
Satellite |
Mass of 1.2 kg, Inertia Matrix \(J_0 = diag([0.01, 0.012, 0.015]) kg \cdot m^{2}\). |
Initial State |
The starting attitude state vector consisting of angular velocity, quaternion orientation, and RW momentum: \([\boldsymbol{\omega}, \mathbf{q}, \mathbf{h}]\). |
Controller |
BDot detumbling controller with gain \(5 \times 10^{4}\). |
Orbital State |
The initial position and velocity of the spacecraft in orbit. |
import ADCS as ADCS
import numpy as np
import matplotlib.pyplot as plt
acts_noise = ADCS.Noise(std_noise=0.005)
acts = [ADCS.MTQ(axis, max_torque=0.1, noise=acts_noise) for axis in np.eye(3)]
sens_noise = ADCS.Noise(std_noise=1e-7)
sens = [ADCS.MTM(axis, noise=sens_noise) for axis in np.eye(3)]
satellite = ADCS.Satellite(mass=10, J_0=np.diag([0.003, 0.003, 0.003]), actuators=acts, sensors=sens)
x_0 = np.array([0.01, 0.05, 0] + [1, 0, 0, 0]) # w, q
controller = ADCS.controller.BDot(est_sat=satellite, gain=5e4)
os0 = ADCS.Orbital_State(ephem=ADCS.Ephemeris(),J2000=0.22, R=np.array([5000, 0, 5000]), V=np.array([0, 7.5, 0]))
results = ADCS.simulate(
x=x_0,
satellite=satellite,
controller=controller,
os0=os0,
dt=10.0,
tf=5000.0
)
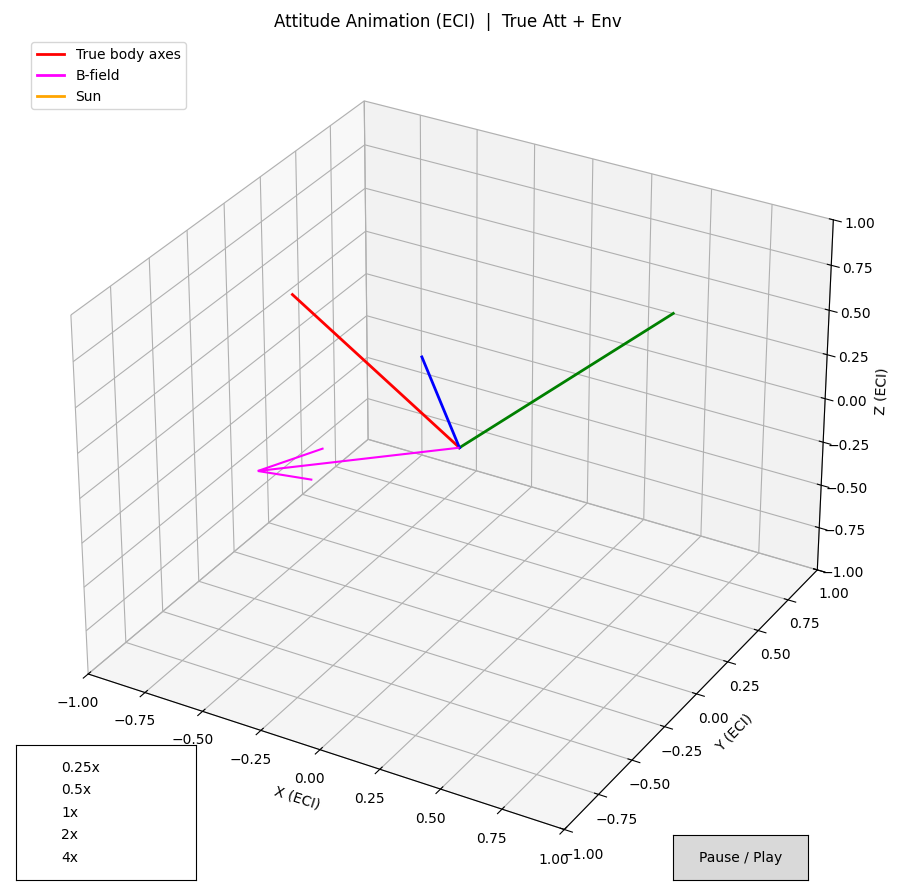
ADCS.plot(
results,
ADCS.plots.AttitudePlot(sources=["real"]),
layout=(1,1),
title="B-Dot Magnetic Detumbling Control",
)
ADCS.plot(
results,
ADCS.plots.AngularVelocityPlotCombined(sources=["real"]),
ADCS.plots.ControlPlotCombined(title="Magnetorquer Commands", units="Am²"),
ADCS.plots.SensorsPlotCombined(title="Magnetometer Readings", sources=["clean"], units="T"),
ADCS.plots.SensorsPlotCombined(title="Magnetometer Readings (Noisy)", sources=["real"], units="T"),
layout=(2,2),
title="B-Dot Magnetic Detumbling Control",
)
plt.show()
|
|